🛠️ Bau deinen eigenen Handfollower mit Arduino Alvik!
In diesem Projekt baust du deinen eigenen Roboter, der wie von Zauberhand deiner Hand folgt – mit dem Arduino Lernroboter.
Perfekter Einstieg in die Programmierung mit Arduino Robotern!
📹 So sieht dein Ergebnis aus:
(Video einfügen)
Was du brauchst:
- Alvik Lernroboter
- Deine Hand 😜
- Basiswissen im Umgang mit Scratch-ähnlicher Programmierung (mBlock)
- Lust am Experimentieren
Schritt-für-Schritt Anleitung:
- Roboter aufstellen:
Stelle den Roboter frei im Raum auf (nicht direkt vor einem Objekt). - Programm hochladen:
- Öffne die Alvik-Programmierumgebung (Blockly/Makecode).
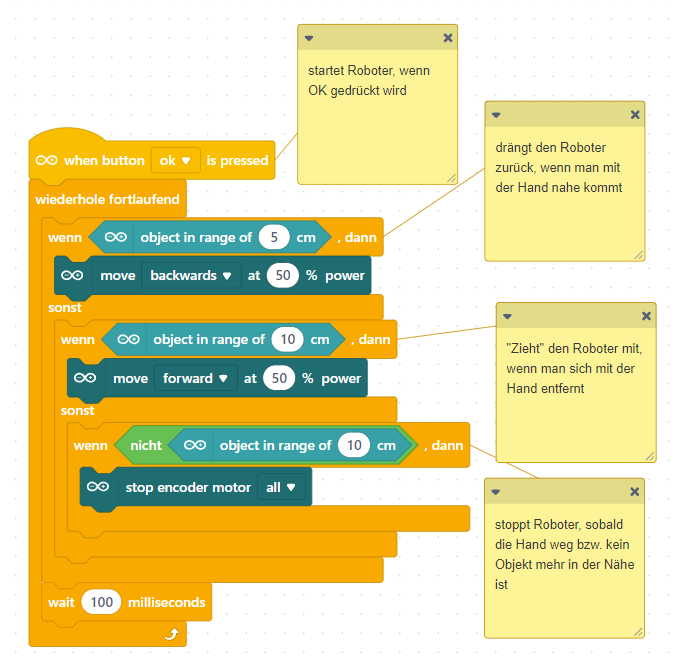
- Programmiere die Handfollower-Logik (oder nutze unser Beispielprogramm).
- Testen und Anpassen:
- Starte den Roboter.
- Probiere aus, ob er deiner Hand folgt und rechtzeitig bremst.
- Justiere ggf. die Geschwindigkeit oder die Sensoreinstellungen.
- Probiere selbst aus, was alles möglich ist und auch ob es andere Wege gibt, die Funktion zu programmieren.
Warum lohnt sich dieses Projekt?
- Du findest schnell heraus, wie man Alvik programmiert
- Du verstehst Grundlagen der Robotik und Automatisierung.
- Du baust eigenständig ein funktionierendes Robotersystem!
🔥 Starte jetzt!
Bereit für dein erstes Technikprojekt?
→ Ergebnis-Video ansehen
Für Interessierte: Wie funktioniert ein Handfollower Roboter?
HHast du dich schon gefragt, wie dein Roboter einer Hand folgen kann, ohne gegen sie zu stoßen?
Das Geheimnis liegt auch hier in zwei spannenden Bereichen:
👉 Sensorik und Regelungstechnik.
🧠 Sensorik: Der Roboter „spürt“ die Hand
Der Arduino Alvik hat vorne einen Infrarot-Abstandssensor. Dieser sendet unsichtbare Infrarotstrahlen aus und misst, wie viel Licht von einem Hindernis – z. B. deiner Hand – zurückkommt.
So funktioniert es:
Dazwischen ➔ der Roboter weiß: „Die Hand ist in Reichweite.“
Ist die Hand weit entfernt ➔ wenig Licht kommt zurück ➔ der Sensor meldet „weiter weg“.
Ist die Hand nah ➔ viel Licht kommt zurück ➔ der Sensor meldet „ganz nah“.
⚙️ Regelungstechnik: Der Roboter reagiert in Echtzeit
Mit den Sensordaten kann der Roboter sofort entscheiden:
- Hand in idealem Abstand ➔ der Roboter fährt deiner Hand hinterher.
- Hand zu weit weg ➔ der Roboter beschleunigt und holt auf.
- Hand zu nah ➔ der Roboter bremst ab oder fährt sogar rückwärts, um Abstand zu halten.
Das Programm im Roboter überprüft ständig den Abstand und passt Geschwindigkeit und Richtung automatisch an. So folgt dein Roboter deiner Hand – fast wie ein kleiner Begleiter!
Das Programm im Roboter überprüft die Sensoren ständig und passt seine Fahrt automatisch an. So folgt dein Roboter der Linie – fast wie auf einer echten Straße!
🌟 Was du dabei lernst
- Wie Roboter Abstände messen können
- Wie Bewegungen automatisch an äußere Bedingungen angepasst werden
- Wie Sensoren und Programme zusammenarbeiten, damit Maschinen sicher reagieren